Scene Detection Classification and Tracking for Self-Driven Vehicle
Article Sidebar
Main Article Content
Abstract
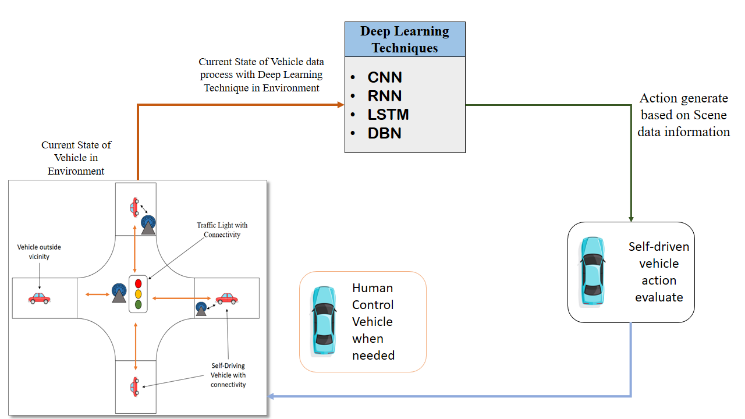
A number of traffic-related issues, including crashes, jams, and pollution, could be resolved by self-driving vehicles (SDVs). Several challenges still need to be overcome, particularly in the areas of precise environmental perception, observed detection, and its classification, to allow the safe navigation of autonomous vehicles (AVs) in crowded urban situations. This article offers a comprehensive examination of the application of deep learning techniques in self-driving cars for scene perception and observed detection. The theoretical foundations of self-driving cars are examined in depth in this research using a deep learning methodology. It explores the current applications of deep learning in this area and provides critical evaluations of their efficacy. This essay begins with an introduction to the ideas of computer vision, deep learning, and self-driving automobiles. It also gives a brief review of artificial general intelligence, highlighting its applicability to the subject at hand. The paper then concentrates on categorising current, robust deep learning libraries and considers their critical contribution to the development of deep learning techniques. The dataset used as label for scene detection for self-driven vehicle. The discussion of several strategies that explicitly handle picture perception issues faced in real-time driving scenarios takes up a sizeable amount of the work. These methods include methods for item detection, recognition, and scene comprehension. In this study, self-driving automobile implementations and tests are critically assessed.
Article Details
References
W. Farag, Z. Saleh, “Road Lane-Lines Detection in Real- Time for Advanced Driving Assistance Systems”, Intern. Conf. on Innovation and Intelligence for Informatics, Computing, and Technologies (3ICT 2018), Bahrain, 18- 20 Nov. 2018.
W. Farag, Z. Saleh, "Traffic Signs Identification by Deep Learning for Autonomous Driving", Smart Cities Symbosium (SCS'18), Bahrain, 22-23 April 2018.
C. Pakusch, G. Stevens, A. Boden, P. Bossauer, Unintended effects of autonomous driving: A study on mobility preferences in the future, Sustainability 10 (2018) 2404
W. Farag, “CANTrack: Enhancing automotive CAN bus security using intuitive encryption algorithms”, 7th Inter. Conf. on Modeling, Simulation, and Applied Optimization (ICMSAO), UAE, March 2017.
C. Premebida, G. Monteiro, U. Nunes, and P. Peixoto, “A Lidar and Vision-based Approach for Pedestrian and Vehicle Detection and Tracking”, 2007 IEEE Intelligent Transportation Systems Conference, 30 Sept.-3 Oct. 2007, Seattle, WA, USA.
A. Petrovskaya, S. Thrun, “Model Based Vehicle Tracking for Autonomous Driving in Urban Environments”, Robotics: Science and Systems 2008, Zurich, CH, June 25-28, 2008.
WHO. Global Status Report on Road Safety 2018: Summary; Technical Report; World Health Organization: Geneva, Switzerland, 2018.
Maddox, J. Improving Driving Safety through Automation, Presentation at the Congressional Robotics Caucus; National Highway Traffic Safety Administration: Washington, DC, USA, 2012.
Benenson, R.; Omran, M.; Hosang, J.; Schiele, B. Ten years of pedestrian detection, what have we learned? In European Conference on Computer Vision; Springer: Zurich, Switzerland, 2014; pp. 613–627.
Nguyen, D.T.; Li, W.; Ogunbona, P.O. Human detection from images and videos: A survey. Pattern Recognit. 2016, 51, 148–175.
Antonio, J.A.; Romero, M. Pedestrians’ Detection Methods in Video Images: A Literature Review. In Proceedings of the 2018 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 13–15 December 2018; pp. 354–360.
Ragesh, N.K.; Rajesh, R. Pedestrian detection in automotive safety: Understanding state-of-the-art. IEEE Access (2019), 7, 47864–47890.
Gilroy, S.; Jones, E.; Glavin, M. Overcoming occlusion in the automotive environment—A review. IEEE Trans. Intell. Transp. Syst. (2019), 22, 23–35.
E. Cho, Y. Jung, Consumers understanding of autonomous driving, Inf Technol People, 31 (2018), p. 1035
T. Brell, R. P, Z. Martina, Suspicious minds? - users’ perceptions of autonomous and connected driving, Theor Issues Ergon Sci, 20 (2019), p. 301
E. Laes, L. Gorissen, F. Nevens, A comparison of energy transition governance in Germany, The Netherlands and the United Kingdom, Sustainability, 6 (2014), pp. 1129-1152
L. Johannesson, N. Murgovski, E. Jonasson, J. Hellgren, B. Egardt Predictive energy management of hybrid long-haul trucks, Contr Eng Pract, 41 (2015), pp. 83-97
M. Ryan, The future of transportation: ethical, legal, social and economic impacts of self-driving vehicles in the year 2025, Sci Eng Ethics, 26 (3) (2019), pp. 1185-1208
Prof. C. Ranjeeth Kumar. (2020). Malware Detection Using Remedimorbus Application. International Journal of New Practices in Management and Engineering, 9(01), 08 - 15. https://doi.org/10.17762/ijnpme.v9i01.82
S. Nordhoff, J. de Winter, M. Kyriakidis, B. van Arem, R. Happee, Acceptance of driverless vehicles: results from a large cross-national questionnaire study, J Adv Transport (2018), pp. 1-22
S. Deb, L. Strawderman, D. Carruth, J. DuBien, B. Smith, T. Garrison, Development and validation of a questionnaire to assess pedestrian receptivity toward fully autonomous vehicles, Transport Res Part C, 84 (2017), pp. 178-195
E. Romera, L.M. Bergasa, R. Arroyo, “A Real-Time Multi-scale Vehicle Detection and Tracking Approach for Smartphones”, 2015 IEEE 18th Inter Conf. on Intelligent Transportation Sys., 15-18 Sept. 2015, Las Palmas, Spain.
L. M. Bergasa, D. Almer´?a, J. Almaz´an, J. J. Yebes, and R. Arroyo, “Drivesafe: an app for alerting inattentive drivers and scoring driving behaviors”, IEEE Intelligent Vehicles Symp. (IV), 2014, pp. 240–245.
A.S. Abdul Rachman, “3D-LIDAR Multi Objet Tracking for Autonomous Driving”, M.Sc. Thesis, Delft University of Technology, Nov. 2017
Gilroy, S.; Jones, E.; Glavin, M. Overcoming occlusion in the automotive environment—A review. IEEE Trans. Intell. Transp. Syst. 2019, 22, 23–35.
Sivaraman, S.; Trivedi, M.M. Looking at vehicles on the road: A survey of vision-based vehicle detection, tracking, and behavior analysis. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1773–1795.
Mukhtar, A.; Xia, L.; Tang, T.B. Vehicle detection techniques for collision avoidance systems: A review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2318–2338.
S., E. ., & Kasturi, K. . (2023). Evaluation of Linkage Between the Corporate Economic Value-Added Analysis and Information Technology Using Big Data. International Journal of Intelligent Systems and Applications in Engineering, 11(4s), 109–117. Retrieved from https://ijisae.org/index.php/IJISAE/article/view/2577
Abdulrahim, K.; Salam, R.A. Traffic surveillance: A review of vision based vehicle detection, recognition and tracking. Int. J. Appl. Eng. Res. 2016, 11, 713–726.
Antony, J.J.; Suchetha, M. Vision based vehicle detection: A literature review. Int. J. Appl. Eng. Res. 2016, 11, 3128–3133.
Shobha, B.S.; Deepu, R. A review on video based vehicle detection, recognition and tracking. In Proceedings of the 2018 3rd International Conference on Computational Systems and Information Technology for Sustainable Solutions (CSITSS), Bengaluru, India, 20–22 December 2018; pp. 183–186.
Abbas, A.F.; Sheikh, U.U.; AL-Dhief, F.T.; Haji Mohd, M.N. A comprehensive review of vehicle detection using computer vision. Telkomnika 2021, 19, 838–850.
Manana, M.; Tu, C.; Owolawi, P.A. A survey on vehicle detection based on convolution neural networks. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017; pp. 1751–1755.]
Smith, J., Ivanov, G., Petrovi?, M., Silva, J., & García, A. Detecting Fake News: A Machine Learning Approach. Kuwait Journal of Machine Learning, 1(3). Retrieved from http://kuwaitjournals.com/index.php/kjml/article/view/142
Wang, H.; Yu, Y.; Cai, Y.; Chen, X.; Chen, L.; Liu, Q. A comparative study of state-of-the-art deep learning algorithms for vehicle detection. IEEE Intell. Transp. Syst. Mag. 2019, 11, 82–95.